As
an open source hardware enthusiast who loves to control my hardware
with an android phone, I have endured the pain of having to write a
new application for every hardware project I make. I finally decided
to write a single app that would be able to control almost any device
I can dream of building. Of course I can do that if I have a
micro-controller on the remote device doing wireless serial
communication with an android phone. Android’s switches and
buttons represent ON/OFF controls while the like of a seekbar
represents PWM control. I call my app, RCcontroller™.
RCcontroller™
is an android application for remotely controlling and monitoring a
hardware device via Bluetooth, WiFi or USB radio. Researchers,
hobbyists and students can build their own controller consisting of
buttons, switches, joysticks, etc. to control a device they have
built. This is one of the most versatile and easy-to-use app for IoT and robotics.
It is a complete WYSIWIG tool and requires no programming
experience all to use. Just drag and drop controls onto the
screen, select your mode of communication and you are done. You
can now not only control your device but track its location, stream
video from it (if your remote device has a camera) and do other forms of parameter
monitoring. Each controller is basically a JSON file
defining the number of controls and parameters as well as their
properties. You can build and sell your hardware and all users need
to do is to download your controller and they can now control what
you have built.
Let’s
now move on to all the features of the app and how we can create our
own controller in less than 10 minutes
When
we first open the application, we are asked for storage permissions.
You must accept this in order to save recorded video. We then see a
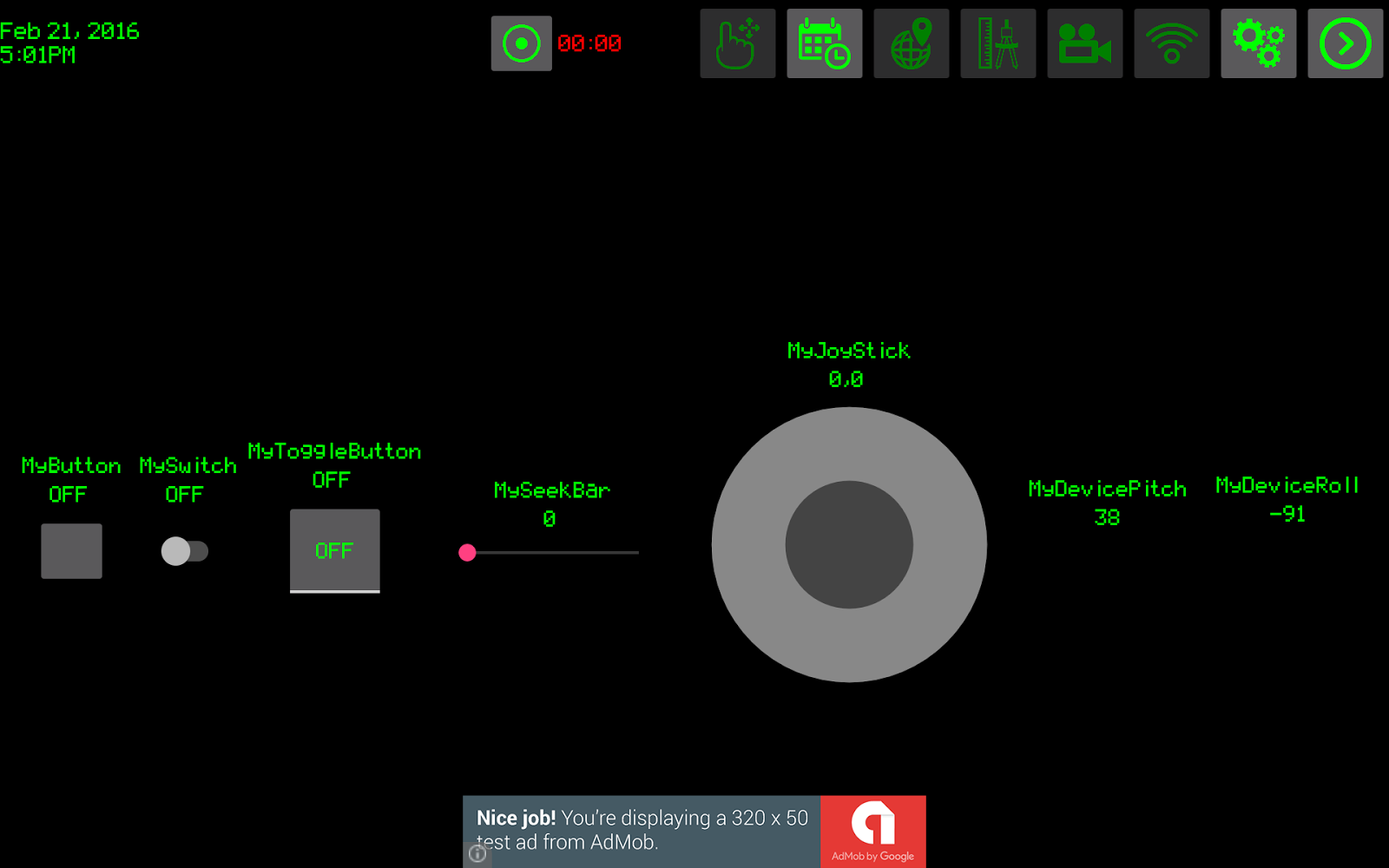
dark screen like this:
Control Centre:

- Calendar:
Displays current time and date.
-
Record screen: This
is used to record the screen. Useful for when you want to record a
video stream.
-
Toggle drag controls: Allows
you to drag and drop controls to preferred location on the screen.
-
Toggle display calendar: Allows
you to show/hide calendar.
-
Toggle map display: Used
to show/hide map. For a controller to support maps, it needs to have
longitude and latitude as part of its parameter list.
-
Toggle OSD graphics display: Shows/Hides
OSD graphics. To
show the azimuth dial and compass, you should have Azimuth as part
of the parameter list. To show pitch/roll dial, you should have
pitch/roll as part of the parameter list.
-
Toggle MJPEG video streaming: Starts
or stops streaming MJPEG video.
-
Toggle wireless communication:
Engages/Disengages communication with remote
device via Bluetooth, WiFi or USB radio.
-
Open Settings: Starts
the setting activity where you can share, edit, copy, delete
controllers or add a new one. You also select the currently active
controller from this activity.
-
Toggle action bar visibility: This
shows/hides all the buttons in order to make the screen emptier.
- Control area: The
whole dark area is valid to contain all your controls and parameters
as well as stream video with the controls on the surface.
Control Types:
-
Button: Value is either on/off. Sends a 1/0 to
remote device.
-
Switch: Value is either on/off. Sends a 1/0 to
remote device.
-
ToggleButton: Value is either on/off. Sends a
1/0 to remote device.
-
SeekBar: Sends values ranging from supplied
min to
max values to remote device.
-
JoyStick: Sends values as pan,tilt (x,y
coordinate of joystick thumb with relative to the joystick view) to
remote device.
-
DevicePitch: Sends the smartphone’s pitch in
landscape mode to the remote device. The format of this control can
only be frequent.
-
DeviceRoll: Sends the smartphone’s roll in
landscape mode to the remote device. The format of this control can
only be frequent.
The textView above each control is the name of the control and the next text view is the value. The value textView tells you the control's value (which is sent to the remote device).
Control
Format:
Note:
Before I make any progress, I want to say there is a video
demonstration of everything on this page, so if you don't understand,
the video might help.
The
control format
is defined by how often the
control values are sent (wirelessly) to the remote device. The order
in which the values are sent is based on the order in which you added
the controls when you were setting up the controller. The control
format can either be seldom
or frequent.
Seldom
control values are only sent to the remote device when at least
one of these control values changes. The command payload, ie, the
data that is sent to the remote device has a prefix of “S” and a
suffix of “\n”. So based on the number of controls, say 3
switches, the command payload, using random values, will be something
like this: “S0,9,1\n”
Frequent
control values are sent to the remote device after every delay
interval. So if we are using either Bluetooth, WiFi or USB radio and
the Bluetooth delay, WiFi delay or the USB transceiver delay is set
to 50 ms, the frequent control values will be sent to the remote
device every 50 milliseconds. This command payload has a prefix of
“F” and a suffix of “\n”. So based on the number of controls,
say 3 switches, the command payload, using random values, will be
something like this: “F0,9,1\n”.
Note:
A joystick sends two values; pan and tilt. So if we have for example
a joystick followed by a button as frequent controls, the payload,
using random values, will be like this: “F0,0,0\n”. With the
first two values representing the pan and tilt of the joystick and
the last value representing the state of the button either 1 or 0.
Parameters
are values sent from the remote device to RCcontroller, on your
smartphone. This would eventually show up as a list on the top right
corner of the Control Center. The payload has a “P” prefix
and “\n” suffix so, using random values, with 3 parameters being
sent to RCcontroller, the payload should look like this:
“P0,9,100\n”.
Enough
with the theory, we can now do really cool stuff. Based on the kind
of communication you want to perform with a remote device, click on
one of the following links to see how RC controller works. Navigate to the bluetooth example post on the right pane.